通过本实验的学习,使学生熟悉三种典型水下机器人的结构,掌握典型ROV机器人运动学模型和动力学模型、机器人运动控制方法,熟悉水下环境参数采集方法及常用传感器,能正确使用水下机器人进行水产品的监测和收获。使学生认识到海洋强国的意义及历史地位,加强对学术前沿的了解,培养科研、学习兴趣,树立海洋强国的学习目标。
本项目采用线下理论学习与分析,线上机器人建模、环境模拟、情节再现虚拟场景实践,通过3D建模、联合仿真、实时交互的计算机技术,真实模拟水下机器人运动控制在海参状态检测、水环境检测、海参拾取的真实应用场景,学生可通过线下设计、线上实践,观察水下机器人完成拾取任务的实际运行效果和设计预期的差距,通过不断调整控制器参数,掌握水下机器人深水运动控制器优化设计的方法。通过视觉传感器检测海参病斑、识别出病态海参并剔除,掌握基于视觉的水下目标物识别与抓取技术的一般方法。
通过该实验项目,可以使学生直观观测水下机器人运动控制情况,认识水下环境。通过交互设计、学习的方法,了解水下机器人在水产养殖上的应用技术。
①典型水下机器人结构认知与组装
在虚拟的海洋环境中,采用交互体验式的教学方式引导学生认真观察海底养殖环境、海底生物,通过观察及组装ROV、AUV、机器鱼三种水下机器人,掌握水下机器人相关知识及关键部件,使学生熟悉水下环境、机器人的结构和动力驱动方式。
②水下机器人运动控制
1、参考坐标系的选取
为方便解析ROV运动规律,首先需要建立一个能够直观展示ROV运动状态的坐标体系,以便于分析水下机器人位置状态量。本项目所选定的坐标体系是参考国际水池会议和造船与轮机工程学会术语公报,分别建立固定坐标系、机器人坐标系、大地坐标系如图1所示
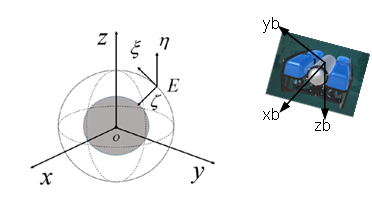
图 1 固定坐标系及大地坐标系
ROV 速度矢量 ,其中u、v、w为线速度,p、q、r 为角速度,以上变量均在机器人坐标系中表示;ROV 推力和推力矩矢量为
,其中u、v、w为线速度,p、q、r 为角速度,以上变量均在机器人坐标系中表示;ROV 推力和推力矩矢量为 ,其中
,其中 、
、 、
、 分别表示为ROV 轴向、横向、垂向的推力,
分别表示为ROV 轴向、横向、垂向的推力, 、
、 、
、 分别为 ROV 的横倾、纵倾、转艏的推力矩。
分别为 ROV 的横倾、纵倾、转艏的推力矩。
在固定坐标系中,ROV 的位置矢量可表示为 其中 N 、E 、D 分别表示 ROV 的位置;
其中 N 、E 、D 分别表示 ROV 的位置; 、
、 、
、 分别表示 ROV 的欧拉角。
分别表示 ROV 的欧拉角。
2、运动学模型
ROV 在 坐标系中位置为
坐标系中位置为 ,欧拉角为
,欧拉角为 ,线速度为
,线速度为 ,角速度为
,角速度为 ,力为
,力为 力矩为
力矩为 。
。
 (1.1)
(1.1)
 (1.2)
(1.2)
 (1.3)
(1.3)
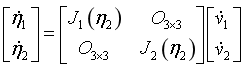
 为机器人坐标系转化到固定坐标系转换矩阵。水下机器人运动模型由机器人坐标系到固定坐标系表达式如(1.4)所示。
为机器人坐标系转化到固定坐标系转换矩阵。水下机器人运动模型由机器人坐标系到固定坐标系表达式如(1.4)所示。
 (1.4)
(1.4)
式中 ,
, 分别为线速度和角速度在机器人坐标系到固定坐标系转化过程的变化矩阵,其表达式如(1.5)和(1.6)所示。
分别为线速度和角速度在机器人坐标系到固定坐标系转化过程的变化矩阵,其表达式如(1.5)和(1.6)所示。
 (1.5)
(1.5)
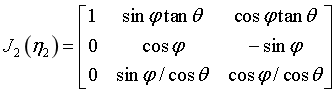 (1.6)
(1.6)
3、动力学模型
项目所用的ROV安装 6 台直流无刷推进器,在6自由度方向产生推力及推力矩如(1.7)所示。
 (1.7)
(1.7)
 纵向推力;
纵向推力;  为横向推力;
为横向推力;  为垂向推力;
为垂向推力; 为横倾力矩;
为横倾力矩;  为纵倾力矩;
为纵倾力矩;  为偏航力矩;
为偏航力矩;
在机器人坐标系下,将水动力作为考虑因素,水下机器人在空间中的六自由度水动力学表达式如(1.8)所示。
 (1.8)
(1.8)
式中 M 为质量惯性矩阵, 为科氏向心力矩阵,
为科氏向心力矩阵, ——流体阻力矩阵,g(η)——重力和浮力向量。
——流体阻力矩阵,g(η)——重力和浮力向量。
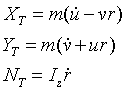
假设机器人坐标系原点与 ROV 载体重心重合,水平面及纵垂面运动方程表达式如(1.9)和(1.10)所示。
水平面运动方程:
 (1.9)
(1.9)
纵垂直面运动方程:
 (1.10)
(1.10)
其中 m 为 ROV 载体质量,I 为 ROV 的惯性量项。
4、定航向运动控制理论
水下机器人做定向控制时,机器人载体携带的航向传感器陀螺仪测得值传给航向控制系统,陀螺仪测得的航向数据 与目标航向数据
与目标航向数据 的差值
的差值  作为PID输入。
作为PID输入。
 (1.11)
(1.11)
控制回路如图2所示,实现的功能是使水下机器人在航行过程中保持目标航向。
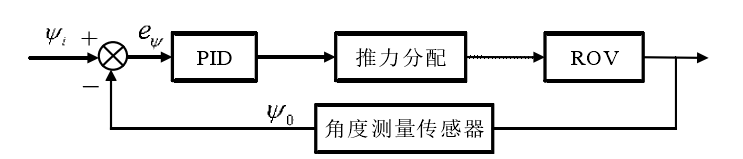
图2水下机器人定航向控制回路
控制系统的输入为航向差 ,可解算出六推进器推力分配的控制信号,从而改变机器人的运动路线产生新的航向数据,经过持续调整推力分配的输出量,将误差
,可解算出六推进器推力分配的控制信号,从而改变机器人的运动路线产生新的航向数据,经过持续调整推力分配的输出量,将误差 逐渐减小至0,实现ROV载体的自主定向控制功能。
逐渐减小至0,实现ROV载体的自主定向控制功能。
 (1-12)
(1-12)
5、定深运动控制理论
定深控制回路输入是机器人与水面深度距离,对比的数据信息为深度传感器测得值,所实现的功能是使ROV始终保持在目标深度 处航行,定深控制回路如图3所示。
处航行,定深控制回路如图3所示。
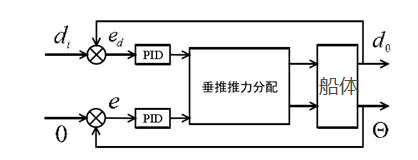
图3水下机器人定深控制基本回路
PID采用比例和积分环节,能快速响应,消除静差。
③海参识别模型原理
海参图像识别采用以卷积神经网络为核心的模型。由于图像在计算机中一般是由多维数组表示,利用卷积核对多维数组进行卷积可以使其共享参数而大大节省参数的数量,因此卷积神经网络相较于其它深度学习网络在图像处理方面有着很大的优势。
典型的卷积神经网络一般由输入层、卷积层、非线性激活函数、池化层、全连接层构成。将卷积、激活函数、池化、全连接等模块按任务需求进行组合,构成了卷积神经网络。卷积神经网络结构如图4所示。
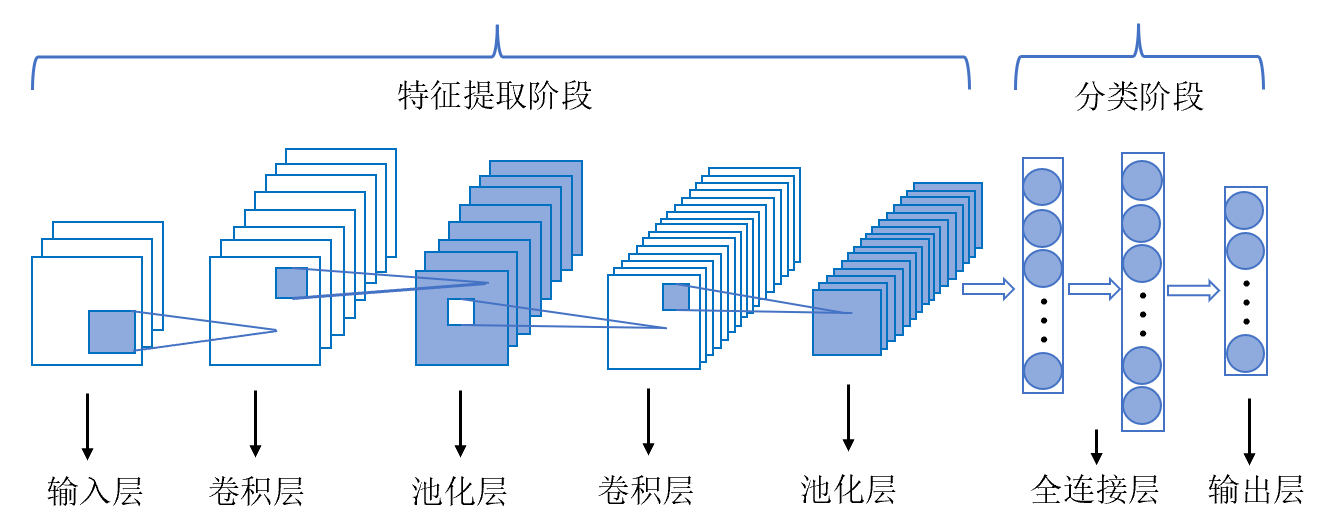
图4标准的卷积神经网络结构
首先通过labelme软件对采集好的图片进行标定,制作数据集。
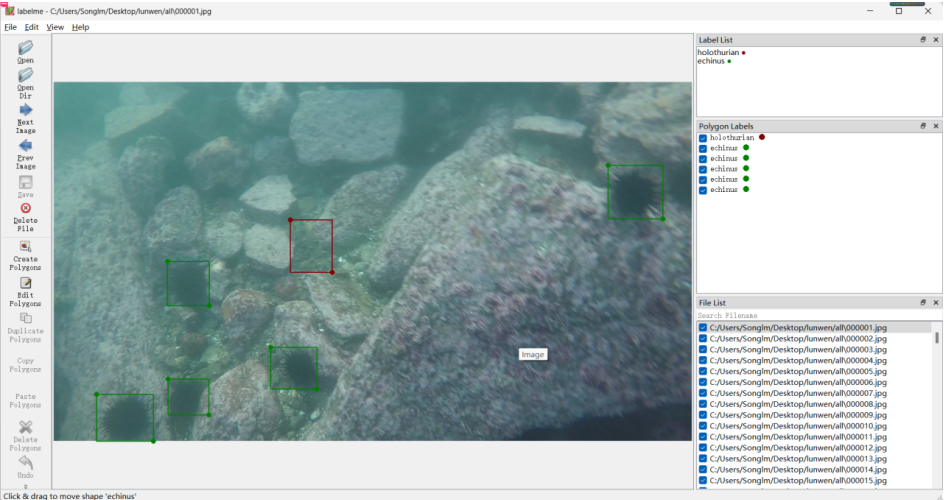
图5数据集标定(红色框为海参目标)
采用基于卷积网络的YOLO模型进行训练,YOLO7原网络模型结构如图6所示。

图6 YOLOv7原网络模型
海参识别结果及精度表示如图7所示。
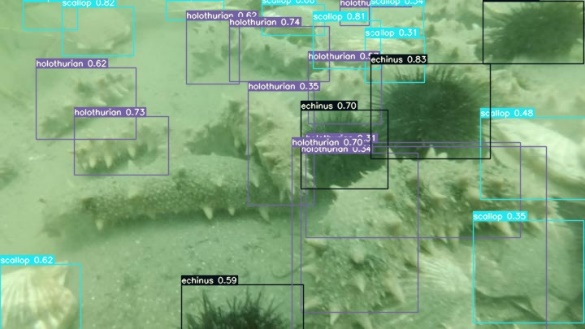
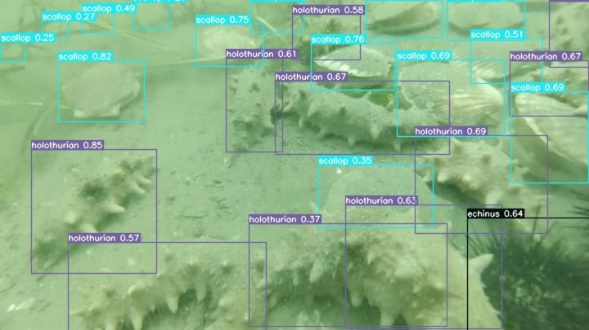
图7基于数据集及YOLOv7模型识别结果及精度表示
知识点:共12个
[1]作业场景认知。
[2]机器人结构认知。
[3]机器人组装。ROV组装、AUV组装、仿生鱼三个机器人组装。
[4]机器人建模——推进器布局及转速、转向调节实现机器人全方位基础运动。
[5]机器人运动控制——定航向控制。
[6]机器人运动控制——定深控制。
[7]水下常用传感器认知、海参最适宜的生长环境参数认知及调节。
[8]机器人在水产养殖上的应用---机器人结构建模,设计推进器布局位置、转速及转向。
[9]机器人在水产养殖上的应用---机器人定航向运动。
[10]机器人在水产养殖上的应用---机器人定深运动。
[11]机器人在水产养殖上的应用---水环境参数调节,调节环境各参数达到海参适宜值。
[12]机器人在水产养殖上的应用---海参识别和抓取,找到幼年海参、成熟海参、生病海参,拍照识别,并将正常成熟海参收获。